10 Figures
\begin{figure}
\begin{center}
\begin{picture}(142,80)
\thicklines
\put (0,72){Parameter}
\put (20,72){Value: \textbf{RDKEYx},\textbf{WRKEYx}}
\put (2,69){access}
\put (20,64){Frame:}
\put (39,64){Basic}
\put (55,64){Data: \textbf{RDDATA, WRDATA}}
\put (37,61){routines}
\put (55,58){Descriptor}
\put (76,58){complete: \textbf{CYDSCR}}
\put (76,53){items}
\put (91,53){values: \textbf{RDDSCR, WRDSCR}}
\put (103,50){\textbf{ADDSCR, DLDSCR}}
\put (91,45){names: \textbf{RDDSCN}}
\put (37,40){\emph{IMAGE} type: \textbf{RDIMAG, WRIMAG}}
\put (20,32){Error: \textbf{WRERR}}
\put (0,25){Parameter: \textbf{CNPAR}}
\put (2,22){control}
\put (0,15){Utilities}
\put (20,15){data conversion: \textbf{CTOx, xTOC}}
\put (20,10){mapping control: \textbf{GETDYN, FRDATA}}
\put (20,5){direct terminal I/O: \textbf{RDUSER, WRUSER}}
\put (20,0){error handler: \textbf{STLERR}}
\put (16,73){\line(1,0){4}}
\put (18,65){\line(1,0){2}}
\put (31,65){\line(1,0){8}}
\put (47,65){\line(1,0){8}}
\put (51,59){\line(1,0){4}}
\put (71,59){\line(1,0){5}}
\put (73.5,54){\line(1,0){2.5}}
\put (84,54){\line(1,0){7}}
\put (87.5,46){\line(1,0){3.5}}
\put (35,41){\line(1,0){2}}
\put (18,33){\line(1,0){2}}
\put (12.5,16){\line(1,0){7.5}}
\put (16,11){\line(1,0){4}}
\put (16,6){\line(1,0){4}}
\put (16,1){\line(1,0){4}}
\put (16,16){\line(0,-1){15}}
\put (18,73){\line(0,-1){40}}
\put (35,65){\line(0,-1){24}}
\put (51,65){\line(0,-1){6}}
\put (73.5,59){\line(0,-1){5}}
\put (87.5,54){\line(0,-1){8}}
\end{picture}
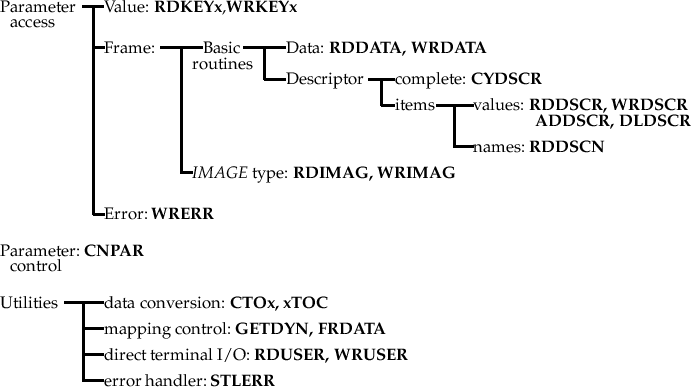
\caption{Functional analysis of INTERIM routines}
\label{functional_analysis_of_interim_routine}
\end{center}
\end{figure}
\begin{figure}
\begin{center}
\begin{picture}(70,50)
\thicklines
\put (0,0){\framebox(30,5){Help Libraries}}
\put (40,0){\framebox(30,5){Human Help}}
\put (0,20){\framebox(30,5){Help}}
\put (0,40){\framebox(30,5){CAR}}
\put (15,20){\vector(0,-1){15}}
\put (15,40){\vector(0,-1){15}}
\put (55,12.5){\vector(0,-1){7.5}}
\put (55,32.5){\vector(0,-1){7.5}}
\put (15,12.5){\line(1,0){40}}
\put (15,32.5){\line(1,0){45}}
\put (63,32.5){\ldots}
\put (53,22.5){\ldots}
\end{picture}
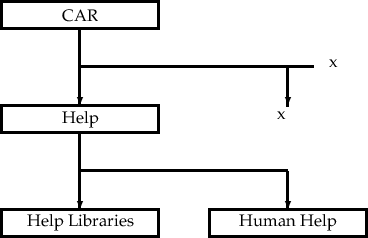
\caption{SCAR Help system}
\label{scar_help_system}
\end{center}
\end{figure}
\begin{figure}
\begin{center}
\begin{picture}(135,46)
\thicklines
\put (30,17){\line (1,0){20}}
\put (50,17){\line (0,1){11}}
\put (30,17){\line (0,1){3}}
\put (30,20){\line (5,1){10}}
\put (40,22){\line (1,6){1}}
\put (41,28){\line (1,0){9}}
\put (70,0){\framebox(20,5){MEMORY}}
\put (70,20){\framebox(20,5){MAIN}}
\put (70,40){\framebox(20,5){INPUT}}
\put (110,20){\framebox(20,5){OUTPUT}}
\put (50,22.5){\vector (1,0){20}}
\put (90,22.5){\vector (1,0){20}}
\put (80,40){\vector (0,-1){15}}
\put (79,20){\vector (0,-1){15}}
\put (81,5){\vector (0,1){15}}
\put (41,19){VDU}
\put (57.5,23.5){I,R}
\put (98,23.5){W}
\put (76,12.5){+}
\put (82,12.5){--}
\put (81,32.5){P,S}
\put (0,40){\textbf{EDIT} mode:}
\end{picture}
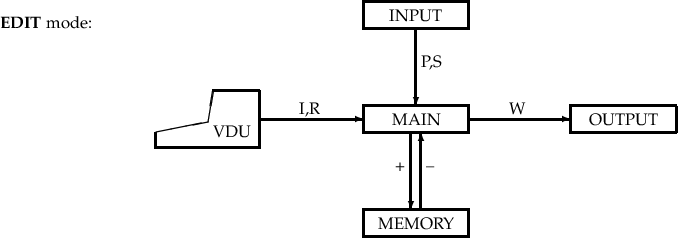
\caption{Data flow in the editing process}
\label{data_flow_in_the_editing_process}
\end{center}
\end{figure}
\begin{figure}
\begin{center}
\begin{picture}(150,90)
\thicklines
\put (20,70){\framebox(30,5){SYSTEM}}
\put (0,55){\framebox(30,5){ACCOUNT}}
\put (40,55){\framebox(30,5){ACCOUNT}}
\put (40,45){\framebox(30,5){Directory}}
\put (20,30){\framebox(30,5){File}}
\put (60,30){\framebox(30,5){File}}
\put (100,30){\framebox(30,5){Container File}}
\put (100,20){\framebox(30,5){Object}}
\put (80,5){\framebox(30,5){Object}}
\put (120,5){\framebox(30,5){Object}}
\put (15,65){\vector(0,-1){5}}
\put (55,65){\vector(0,-1){5}}
\put (55,55){\vector(0,-1){5}}
\put (35,40){\vector(0,-1){5}}
\put (75,40){\vector(0,-1){5}}
\put (115,30){\vector(0,-1){5}}
\put (95,15){\vector(0,-1){5}}
\put (135,15){\vector(0,-1){5}}
\put (90,32.5){\vector(1,0){10}}
\put (100,32.5){\vector(-1,0){10}}
\put (35,70){\line(0,-1){5}}
\put (55,45){\line(0,-1){5}}
\put (115,20){\line(0,-1){5}}
\put (15,65){\line(1,0){40}}
\put (35,40){\line(1,0){40}}
\put (95,15){\line(1,0){40}}
\put (15,55){\line(0,-1){1}}
\put (15,53){\line(0,-1){1}}
\put (15,51){\line(0,-1){1}}
\put (20,80){\textbf{VMS File System}}
\put (110,80){\textbf{HDS}}
\end{picture}
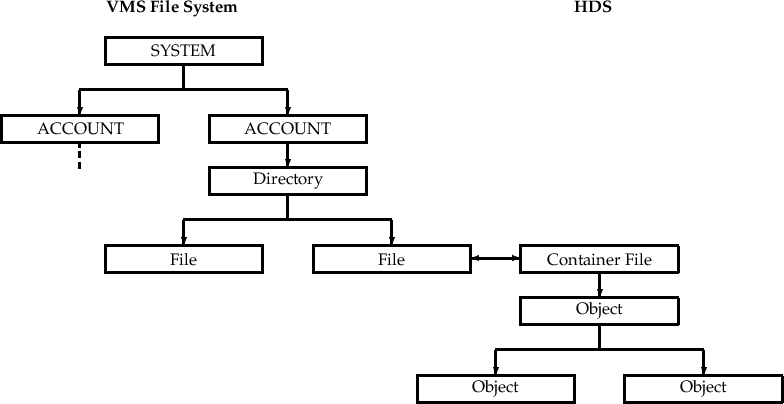
\caption{The relationship between VMS and HDS}
\label{the_relationship_between_VMS_and_HDS}
\end{center}
\end{figure}
\begin{figure}
\begin{center}
\begin{picture}(130,43)
\thicklines
\put (7,40){P(n)}
\put (67,40){S(n)}
\put (67,30){P(n)}
\put (82,30){P(n)}
\put (97,30){P(n)}
\put (7,30){S(n)}
\put (7,20){P(n)}
\put (22,20){S(n)}
\put (37,20){P(n,n,n)}
\put (22,10){P(n)}
\put (37,10){P(n)}
\put (52,10){S(n,n)}
\put (52,0){P(n)}
\put (67,0){P(n,n,n,n)}
\put (70,38){\line(0,-1){4}}
\put (70,36){\line(1,0){30}}
\put (85,36){\line(0,-1){2}}
\put (100,36){\line(0,-1){2}}
\put (10,28){\line(0,-1){4}}
\put (10,26){\line(1,0){30}}
\put (25,26){\line(0,-1){2}}
\put (40,26){\line(0,-1){2}}
\put (25,18){\line(0,-1){4}}
\put (25,16){\line(1,0){30}}
\put (40,16){\line(0,-1){2}}
\put (55,16){\line(0,-1){2}}
\put (55,8){\line(0,-1){4}}
\put (55,6){\line(1,0){15}}
\put (70,6){\line(0,-1){2}}
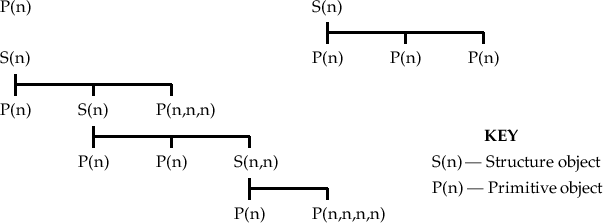
\put (100,15){\textbf{KEY}}
\put (90,10){S(n) --- Structure object}
\put (90,5){P(n) --- Primitive object}
\end{picture}
\caption{Diagrams of Structure Objects}
\label{diagrams_of_structure_objects}
\end{center}
\end{figure}
\begin{figure}
\begin{center}
\begin{picture}(110,35)
\thicklines
\put (40,30){\framebox(30,5){SKY\_POSITION}}
\put (40,25){\framebox(30,5){[equatorial]}}
\put (0,10){\framebox(30,5){RA}}
\put (0,5){\framebox(30,5){[\_char*12]}}
\put (0,0){\framebox(30,5){‘10:59:17.20’}}
\put (40,10){\framebox(30,5){DEC}}
\put (40,5){\framebox(30,5){[\_char*12]}}
\put (40,0){\framebox(30,5){‘47:23:15.00’}}
\put (80,10){\framebox(30,5){EQUINOX}}
\put (80,5){\framebox(30,5){[\_char*7]}}
\put (80,0){\framebox(30,5){‘B1950.0’}}
\put (15,20){\line(1,0){80}}
\put (15,20){\vector(0,-1){5}}
\put (55,25){\vector(0,-1){10}}
\put (95,20){\vector(0,-1){5}}
\end{picture}
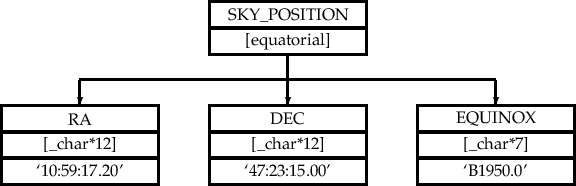
\caption{An Alternative Representation for SKY\_POSITION}
\label{an_alternative_representation_for_sky_position}
\end{center}
\end{figure}
\begin{figure}
\begin{center}
\begin{picture}(40,25)
\thicklines
\put (0,20){\framebox(40,5){parent RID}}
\put (0,15){\framebox(25,5){reserve}}
\put (25,15){\framebox(5,5){M}}
\put (30,15){\framebox(5,5){Z}}
\put (35,15){\framebox(5,5){A}}
\put (0,10){\framebox(5,5){C}}
\put (5,10){\framebox(15,5){class}}
\put (20,10){\framebox(20,5){size}}
\put (0,5){\framebox(40,5){domain (S) length}}
\put (0,0){\framebox(40,5){domain (D) length}}
\put (42,22){(24 bits)}
\put (42,17){($5+1+1+1$ bits)}
\put (42,12){($1+3+4$ bits)}
\put (42,7){(8 bits)}
\put (42,2){(32 bits)}
\end{picture}
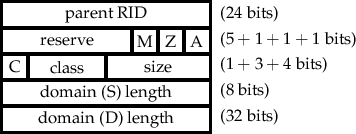
\caption{Structure of a Record Control Label}
\label{structure_of_a_record_control_label}
\end{center}
\end{figure}
Put this before the ‘begin{document}’ command:
\providecommand {\radec} {$[\alpha,\delta\,]$}
\providecommand {\mhadec} {$[-h,\delta\,]$}
\providecommand {\azel} {$[A,E\,]$}
Put this in the main body of your text:
\begin{figure}
\begin{small}
\begin{center}
\begin{tabular}{|ccccc|} \hline
& & & & \\
& $\rightarrow$ & MEAN \radec & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & J2000 FK5 MEAN \radec & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & annual aberration & $\downarrow$ & \\
& & light deflection & $\downarrow$ & \\
& & precession/nutation & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& $\rightarrow$ & APPARENT \radec & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & Earth rotation & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & APPARENT \mhadec & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & diurnal aberration & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & TOPOCENTRIC \mhadec & $\downarrow$ & \\
& & $|$ & 20~Hz & \\
& & \mhadec\ to \azel & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& $\rightarrow$ & TOPOCENTRIC \azel & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & refraction & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & OBSERVED \azel & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & azimuth axis tilt & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& & tube flexure & $\downarrow$ & \\
& & Az/El nonperpendicularity & $\downarrow$ & \\
& & position of instrument rotator & $\downarrow$ & \\
& & pointing axis & $\downarrow$ & \\
& & $|$ & $\downarrow$ & \\
& $\rightarrow$ & MOUNT \azel & $\downarrow$ & \\
& & $\downarrow$ & $\downarrow$ & \\
& & \fbox{SERVO} & & \\
& & $\uparrow$ & $\uparrow$ & \\
& & CORRECTED ENCODER \azel & $\uparrow$ & \\
& & $|$ & $\uparrow$ & \\
& & gear \& centering errors & 20n~Hz & \\
& & encoder index errors & $\uparrow$ & \\
& & encoder errors & $\uparrow$ & \\
& & $|$ & $\uparrow$ & \\
& & RAW ENCODER \azel & $\uparrow$ & \\
& & & & \\
& & & & \\
\hline
\end{tabular}
\end{center}
\end{small}
\caption{The pointing flow}
The set of transformations shown describes the relationship between the target
position (one of those marked $\rightarrow$) and the required telescope encoder
readings. There are two major transformations: \radec\ to \mhadec, and \mhadec\
to azimuth and elevation \azel. The others are all minor.
\end{figure}
\begin{figure}
\begin{small}
\begin{center}
\begin{tabular}{|cccccc|} \hline
& & & & & \\
\hspace{6em} & \hspace{6em} & \hspace{6em} &
\hspace{6em} & \hspace{6em} & \hspace{6em} \\
\multicolumn{2}{|c}{\hspace{1em}\fbox{FK4, any eqnx}$\Leftarrow$} &
\multicolumn{2}{c}{\hspace{1em}\fbox{FK4, no $\mu$, any eqnx}$\Leftarrow$} &
\multicolumn{2}{c|}{\hspace{1em}\fbox{FK5, any eqnx}$\Leftarrow$} \\
& \multicolumn{2}{|c|}{} & \multicolumn{2}{c|}{} & \\
\multicolumn{2}{|c}{space motion} & \multicolumn{1}{c|}{} & &
\multicolumn{2}{c|}{space motion} \\
\multicolumn{2}{|c}{-- E-terms} &
\multicolumn{2}{c}{-- E-terms} & \multicolumn{1}{c|}{} & \\
\multicolumn{2}{|c}{prec to B1950} & \multicolumn{2}{c}{prec to B1950} &
\multicolumn{2}{c|}{prec to J2000} \\
\multicolumn{2}{|c}{+ E-terms} &
\multicolumn{2}{c}{+ E-terms} & \multicolumn{1}{c|}{} & \\
\multicolumn{2}{|c}{to J2000, no $\mu$} & \multicolumn{1}{c|}{} &
\multicolumn{2}{c|}{} & \\
\multicolumn{2}{|c}{parallax} & \multicolumn{1}{c|}{} & &
\multicolumn{2}{c|}{parallax} \\
\multicolumn{2}{|c}{to J2000} & \multicolumn{2}{c}{to J2000, no $\mu$} &
\multicolumn{1}{c|}{} & \\
& \multicolumn{2}{|c|}{} & \multicolumn{2}{c|}{} & \\ \cline{2-5}
\multicolumn{3}{|c|}{} & & & \\
& & \multicolumn{2}{c}{\fbox{FK5, J2000}} & & \\
\multicolumn{3}{|c|}{} & & & \\ \cline{3-4}
& & \multicolumn{2}{|c|}{} & & \\
& \multicolumn{2}{c}{to B1950, no $\mu$} & \multicolumn{1}{c|}{} & & \\
& \multicolumn{2}{c}{fictitious $\mu$} & \multicolumn{1}{c|}{} & & \\
& \multicolumn{2}{c}{-- E-terms} & \multicolumn{1}{c|}{} & & \\
& \multicolumn{2}{c}{prec to given eqnx} &
\multicolumn{2}{c}{prec to given eqnx} & \\
& \multicolumn{2}{c}{+ E-terms} & \multicolumn{1}{c|}{} & & \\
& & \multicolumn{2}{|c|}{} & & \\
& \multicolumn{2}{c}
{\hspace{1em}\fbox{FK4, given eqnx, curr ep}$\leftarrow$}
& \multicolumn{2}{c}
{\hspace{1em}\fbox{FK5, given eqnx, curr ep}$\leftarrow$} & \\
& & \multicolumn{2}{|c|}{} & & \\
& \multicolumn{2}{c}{-- E-terms} & \multicolumn{1}{c|}{} & & \\
& \multicolumn{2}{c}{prec to B1950} &
\multicolumn{2}{c}{prec to J2000} & \\
& \multicolumn{2}{c}{+ E-terms} & \multicolumn{1}{c|}{} & & \\
& \multicolumn{2}{c}{to J2000, no $\mu$} & \multicolumn{1}{c|}{} & & \\
& & \multicolumn{2}{|c|}{} & & \\ \cline{3-4}
\multicolumn{3}{|c|}{} & & & \\
& & \multicolumn{2}{c}{\fbox{FK5, J2000, curr ep}} & & \\
\multicolumn{3}{|c|}{} & & & \\
& & \multicolumn{2}{c}{light deflection} & & \\
& & \multicolumn{2}{c}{annual aberration} & & \\
& & \multicolumn{2}{c}{precession/nutation} & & \\
\multicolumn{3}{|c|}{} & & & \\
& & \multicolumn{2}{c}{$\Rightarrow$\fbox{Apparent}$\leftarrow$} & & \\
& & & & & \\
& & & & & \\ \hline
\end{tabular}
\end{center}
\end{small}
\caption{Transformations for mean \radec}
The forms marked $\Rightarrow$ are those available for target data entry (target coordinates),
a choice of four; the forms marked $\rightarrow$ are available for telescope control (tracking
coordinates). Pick one of each and follow the flow downwards. The sequences down to the chosen
tracking coordinates have only to be executed once per new target, but all the transformations
from that level down have to be performed at the full pointing rate.
\end{figure}
\begin{center}
\begin{picture}(120,100)
\put(60,50){\oval(100,80)}
\put(50,85){\makebox(20,5){Base}}
\put(20,40){\framebox(50,40)[tl]{Frame}}
\put(25,60){\framebox(40,15)[tl]{Data}}
\put(27,63){\circle*{1}}
\put(29,66){\circle*{1}}
\put(35,66){\circle*{1}}
\put(39,64){\circle*{1}}
\put(40,67){\circle*{1}}
\put(42,66){\circle*{1}}
\put(46,69){\circle*{1}}
\put(50,67){\circle*{1}}
\put(51,70){\circle*{1}}
\put(54,70){\circle*{1}}
\put(56,68){\circle*{1}}
\put(63,73){\circle*{1}}
\put(28,64){\line(5,1){34}}
\put(25,45){\framebox(25,10)[tl]{Data}}
\put(25,48){\line(1,0){2}}
\put(27,48){\line(0,-1){2}}
\put(27,46){\line(1,0){2}}
\put(29,46){\line(0,1){1}}
\put(29,47){\line(1,0){2}}
\put(31,47){\line(0,1){2}}
\put(31,49){\line(1,0){2}}
\put(33,49){\line(0,1){3}}
\put(33,52){\line(1,0){2}}
\put(35,52){\line(0,1){1}}
\put(35,53){\line(1,0){2}}
\put(37,53){\line(0,-1){3}}
\put(37,50){\line(1,0){2}}
\put(39,50){\line(0,1){1}}
\put(39,51){\line(1,0){2}}
\put(41,51){\line(0,-1){3}}
\put(41,48){\line(1,0){2}}
\put(43,48){\line(0,1){1}}
\put(43,49){\line(1,0){2}}
\put(45,49){\line(0,-1){2}}
\put(45,47){\line(1,0){2}}
\put(47,47){\line(0,1){3}}
\put(47,50){\line(1,0){2}}
\put(49,50){\line(0,-1){2}}
\put(49,48){\line(1,0){1}}
\put(40,40){\line(0,-1){20}}
\put(40,20){\line(1,0){50}}
\put(90,20){\line(0,1){50}}
\put(90,70){\line(-1,0){20}}
\put(70,40){\shortstack[l]{t discovery \\ ~all agreed \\obel Prize. \\
ummed up \\ the moon".}}
\put(72,22){\framebox(16,16)[tl]{Data}}
\put(80,30){\circle{10}}
\put(80,30){\vector(-1,4){1}}
\put(80,30){\vector(-1,0){3}}
\put(80,30){\vector(-4,-1){7.5}}
\put(80,30){\vector(-1,-1){4.5}}
\put(80,30){\vector(-1,-3){1.2}}
\put(47,31){\shortstack[l]{Vector display \\ of the results. }}
\put(25,40){\line(0,-1){5}}
\put(25,35){\line(1,0){15}}
\put(70,72){\line(1,0){7}}
\put(77,72){\line(0,-1){2}}
\end{picture}
\end{center}
Copyright © 1997 Council for the Central Laboratory of the Research C ouncils